Introduction
This week Joe Hupy gave the class the assignment conducting a survey through the use of the distance and azimuth method. The most important part of this method is finding a base point. Once you have that point it is used to map out all the features in relation of distance and azimuth to it. This is a low tech method that can be used when technology and more advanced methods fail or are not possible. This could be caused be bad weather like extreme cold or hot temps that cause the instruments to malfunction or something as simple as running out of battery. Technology does and will fail and this method gives you an easy and effective alternative. There a couple of different ways the data could be collected for this exercise. You could two separate instruments to find the distance and azimuth such as a range finder (Figure 1) and a compass (Figure 2). In our case we got to use a instrument that can do both at the same time. This was very handy and a big time saver. We used a TruPulse laser (Figure 3).
 |
| This is a Vector Optics laser range finder. By looking through the lenses and placing the crosshairs on your target it will read the distance you are from that object. (Figure 1) |
 |
| This is a Suunto compass. You can find azimuth by looking through the hole on the compass and when you point it at the object you want to find the azimuth for it will display in that hole. (Figure 2) |
 |
This TruPulse laser unit will find both azimuth and distance at the same
time. These are the units we used for this exercise. (Figure 3)
|
Joe Hupy took us outside into the Phillips Hall court yard here on campus and gave a quick demo on how to use this equipment. He then split us into our groups for the week and gave us the assignment. We were to find a study are that was 1/4 to 1 hectare in size to collect our data in. In this area we were supposed to collect at least 100 data points recording their distance, azimuth and a couple other attributes of our choice for each one. After the data is collected it will be imported back into ArcMap where it will be used to make maps of the collected points.
One thing Joe told us to consider is Magnetic Declination. It is the angle between magnetic north and the true north which changes as the earth's magnetic field varies based on location and time. I looked on line and found a website dedicated to Magnetic Declimation values based on your search location and it said that on the day our data was collected the declination for Eau Claire was one degree west. This means our recorded data will be one degree less than true north. This isn't a huge factor here in Eau Claire but in other areas of the world this declination value can be much higher.
Methods
Study Area
The first step of the assignment and data collection was to choose a study area. Our group decided that the parking lot area behind Davis Center and Phillips Hall here on campus would be a good location (Figure 4). We were interested in collecting car data so this was a very well suited location. There are lots of cars in a relatively small area making the collection of 100 points pretty easy. In order to find a base location we opened up Google Earth and looked for easily identifiable objects in the this area that would also give us a good view of the parking lot. We also found the latitude and longitude for our base locations which will be used at a later time in ArcMap when creating our maps. We determined that one of the statues behind Phillips Hall and a sewer cap down by Davis Center would be the best location for our base points. They were both raised platforms which made the cars easy to see and not only see one row but multiple rows of cars. Figures 5 and 6 are panoramic views from our two base locations.
 |
Figure 4
The red rectangle in the image shows our study area behind Phillips Hall and the Davis Center. |
 |
Figure 5
Panorama view of base point 1 |
 |
Figure 6
Panorama view of base point 2 |
Survey Process
In order to collect our data and get values for distance and azimuth that were as accurate as possible we mounted the TruPulse laser to a tripod for stability and base point location accuracy. Keeping the laser unit in the same base location while collecting data is essential to getting accurate readings. We took turns locating cars and firing the laser to gather our distance and azimuth values. The other team member was recording these reading as well as our other attributes such as car color and brand. The distance was recorded in units of meters and the azimuth was collected in decimal degrees. We gathered the data in increments of 10 to 20 cars row by row to make it easy to keep track of what cars we had done. In some cases it was difficult to get the TruPulse to get an accurate reading on the distances of the cars. Shadows and reflection from the sun were likely contributors to this problem. Keeping the TruPulse steady was difficult at times as well which also contributed to less accurate or more time consuming readings.
Data Entry and Mapping
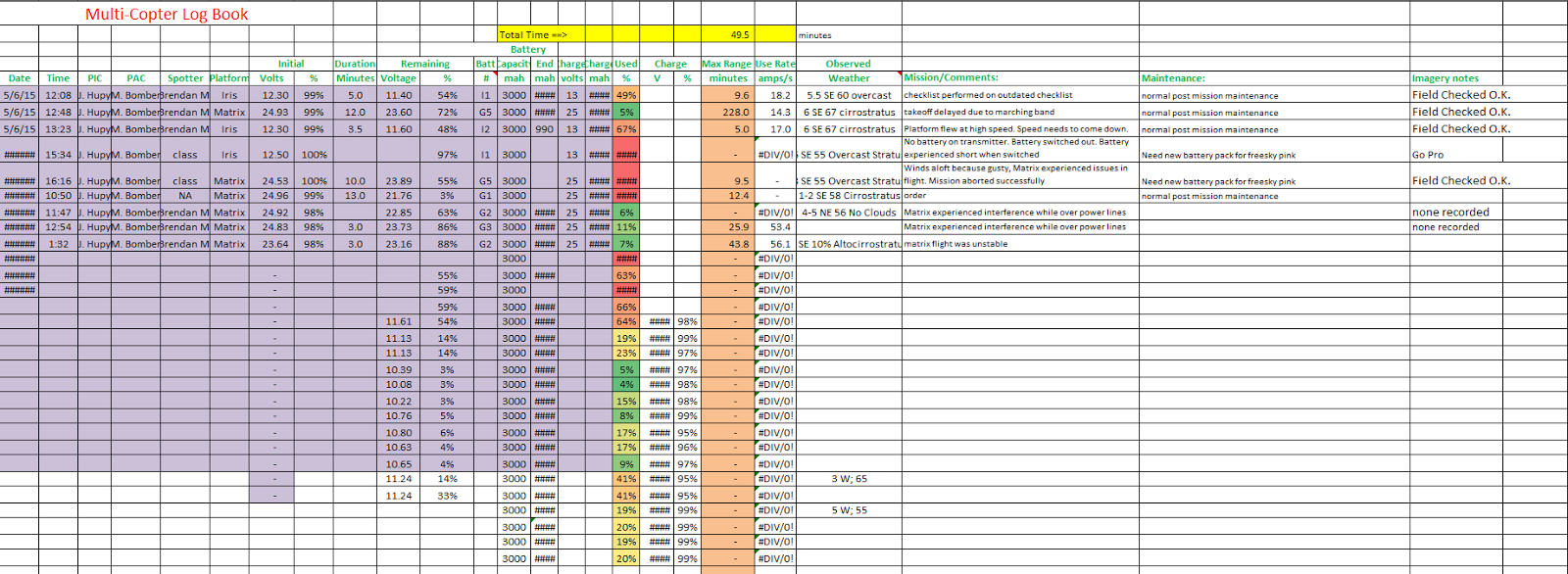
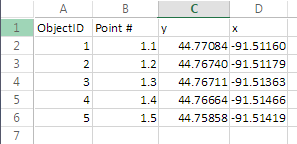
All of our data points were collected in a Excel spread sheet using one of the Geography departments Microsoft Surface tablets. Having that tablet in the field was super convenient because instead of having to write down the data and later transfer it into an Excel sheet we could do all that in the field as we went. Figure 7 a and b is the resulting Excel sheet which we then imported into ArcMap.
 |
| Figure 7b |
 |
| Figure 7a |
The first step of the mapping process in ArcMap was to add a basemap. This gives us a visual reference as to where our data points were collected. For my base map I used an aerial photo in the geography departments Eau Claire County data folder (Figure 8).
|
Figure 8
Aerial photo from Geography GIS data folder |
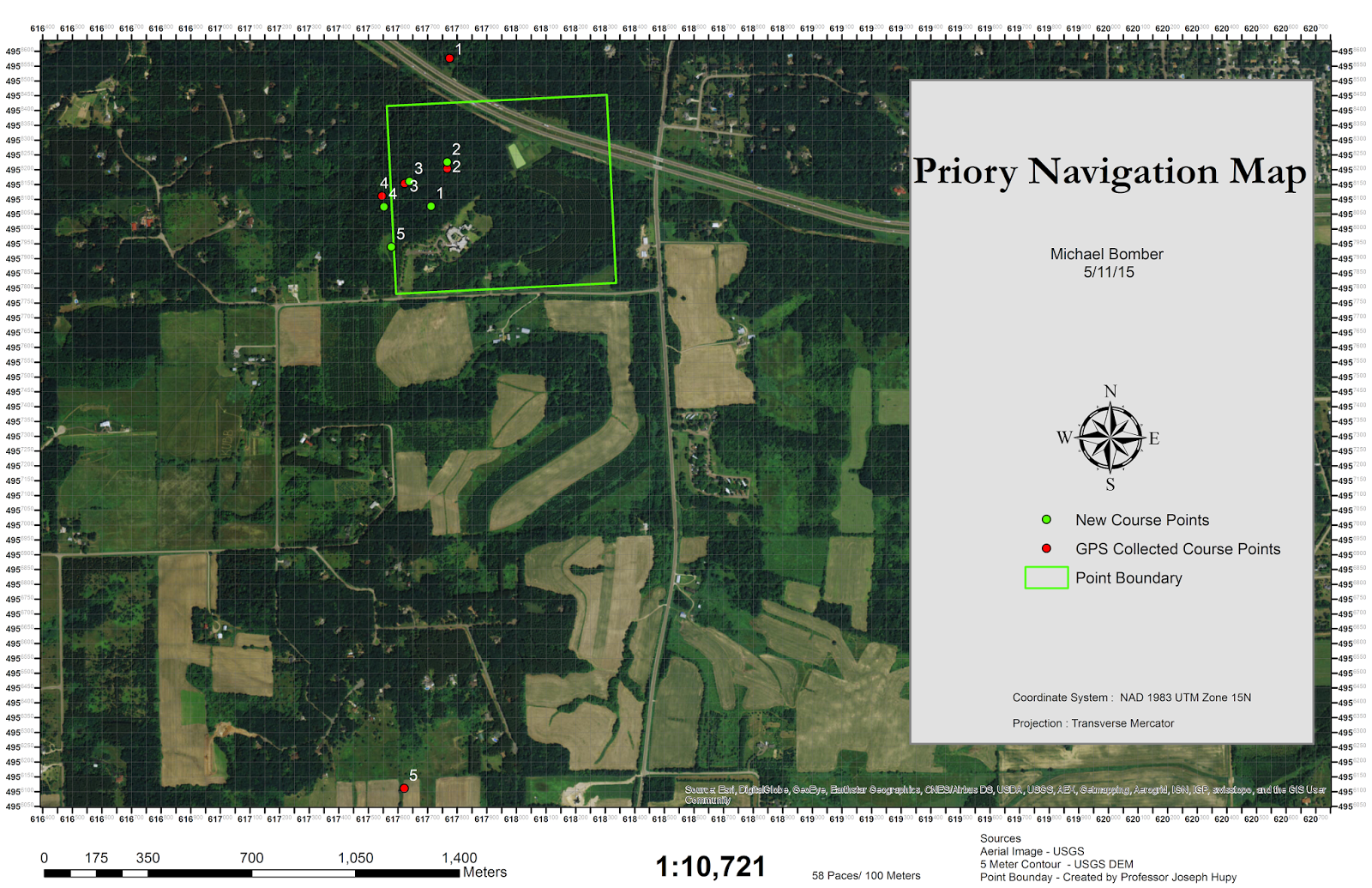
Next a geodatabase was created to hold all the collected field data. This is where the Excel spread sheet will be imported to. We then needed to determine the location of our too base points. In order to do so we located them on Google Earth imagery and found location one to be 44.796908 N and 91.50104 W. Location 2 was 44.796408 N and 91.49952 W (Figure 9).
 |
Figure 9
Base points for data collection |
Once we had our base locations we then imported the Excel spread sheet. In order to do this you right click on the geodatabase and hit import and then choose the Excel file. We now need to find the location of the surveyed features so that they can be mapped. We used the Bearing Distance to Line tool in ArcMap to do so (Figure 10). The tool takes the information in the Excel and turns it into a line feature class based on the an X and Y coordinate field (Longitude and Latitudinal location in decimal degrees), a bearing field or azimuth and a distance field. Figure 11 is the resulting map from running this tool.
 |
Figure 10
Bearing Distance to Line tool |
 |
Figure 11
Line feature class generated by Bearing Distance to Line tool |
This tool does not give you the actual location of the data points collected however for that a different tool must be run. Using the Feature Vertices to Points tool (Figure 12) in ArcMap points are placed at the end of the vertices giving a point for each collected data point (Figure 13).
 |
| Figure 12 |
 |
Figure 13
Data points generated by Vertices to Points tool |
These are only location points however we are interested in displaying the attributes we collected for each point as well. In order to this a simple join between these surveyed points and the original Excel sheet with the attribute information in it. The join is based on the ID fields. Once these are joined we were able to display not only the locations but the attributes we collected as well. Figures 14 and 15 show the collected data points sorted by color and car brand respectively.
 |
Figure 14
Map showing data points by vehicle color |
 |
Figure 15
Map showing data points by vehicle brand |
Results and Discussion
For the most part our data points seem to be quite accurate and line up with the real life aerial imagery very well. There is a row of cars that seems to be slightly off the actual arrangement of the cars in the parking lot but this could be due to old aerial imagery that has different parking spaces than the current layout of the parking lot. This also could have been user error causing inaccurate distance readings with the TruPulse unit. It also could have been incorrect entry of the distance values but this seems less likely because there seems to be a pattern to the location error. If it was incorrect data entry you would expect a point that is drastically our of place and random. Making sure the base location does not change during data collection is vital. Movement from the base point between point collection will give you inaccurate readings. Like I talked about before other errors could be caused by shadows or sun reflecting off car windows which make it harder for the TruPulse to get an accurate reading.
Data collection went very smoothly for our group. We were familiar with the technology and technique we were to use and weren't really doing trial and error to find the best way to collect the data. This cut down on the time it took to collect our data and I think it also improved our data accuracy over someone who has never used this technology or method before. From reading past years blogs we could see what worked well and what didn't. From that information we made the biggest decision of where to put our base points for collection. The key to this exercise for us was the fact that our base points were elevated location that had few if any obstacles between us and the data point locations. We were able to collect our data in just over an hour which was pretty fast for the amount of points needed. If you were going to be out in the field for extended periods of time extra batteries or potable chargers for the tablet and TruPulse would be good to have. Anything you can do to cut down on the risk of technology failure is ideal.
Once we had our data collected the analysis and map creation for this exercise were fairly easy. It took about 20 minutes to run our tools in ArcMap and get the data in a displayable format. We only did 2 attributes for our points but the detail you could collect and display for each point is endless. It all depends what the purpose of the project is.
Conclusion
This is a low tech method of data collection. It is handy to know how to use because we all know technology fails from time to time. (Usually when we need it most.) This activity could have been done with a measuring stick and a compass, you don't need anything fancy. We were lucky using the TruPulse instead but it can be done in many other even simpler ways. The class leaned a valuable field skill that is applicable in many situations but more than that we learned the best way to do this technique and what to watch for that could reduce accuracy of your data.














































{kind=link}