Introduction
This week for field methods we did something a little bit different than the normal activities. This week was more a show and tell and step by step demonstration of how to use an Unmanned Aerial System (UAV). Professor Hupy and myself gave the class a demo of pre-flight procedures, data collection, and post flight procedures. The class learned how a typical day flying and collecting data goes from the arrival on the cite and taking weather conditions to UAV inspection and post flight data processing. professor Hupy and myself stressed safety precautions and following our flight plan to ensure a safe and productive demonstration for the class. We were again out at the Priory just south of town. The two UAV platforms we flew were the Matrix (Figure 1) and Iris (Figure 2).
 |
| Figure 1 is an IRIS made by 3D Robotics. This is an out of the box ready to fly UAV that costs around $700. |
 |
| Figure 2 is the Matrix by Turbo Ace. This is an image of the one we flew for this exercise. It is a more do it yourself kind of platform that requires a lot of assembly and much more mechanical knowledge to construct. This is about 4 to 5 thousand dollars with all the electronics on it. |
Methods
I was involved in this activity to help demonstrate so my steps and methods may be different from others in the class who got to take notes and watch the demo.I will base my methods section off of the flight procedure checklist and what a normal data collection mission would be like when I do my research with professor Hupy. Again this whole procedure is used in order to eliminate human error during set up, increase flight safety and prevent damage to our vehicles and sensors that are on board collecting data.
Step 1 Study Area
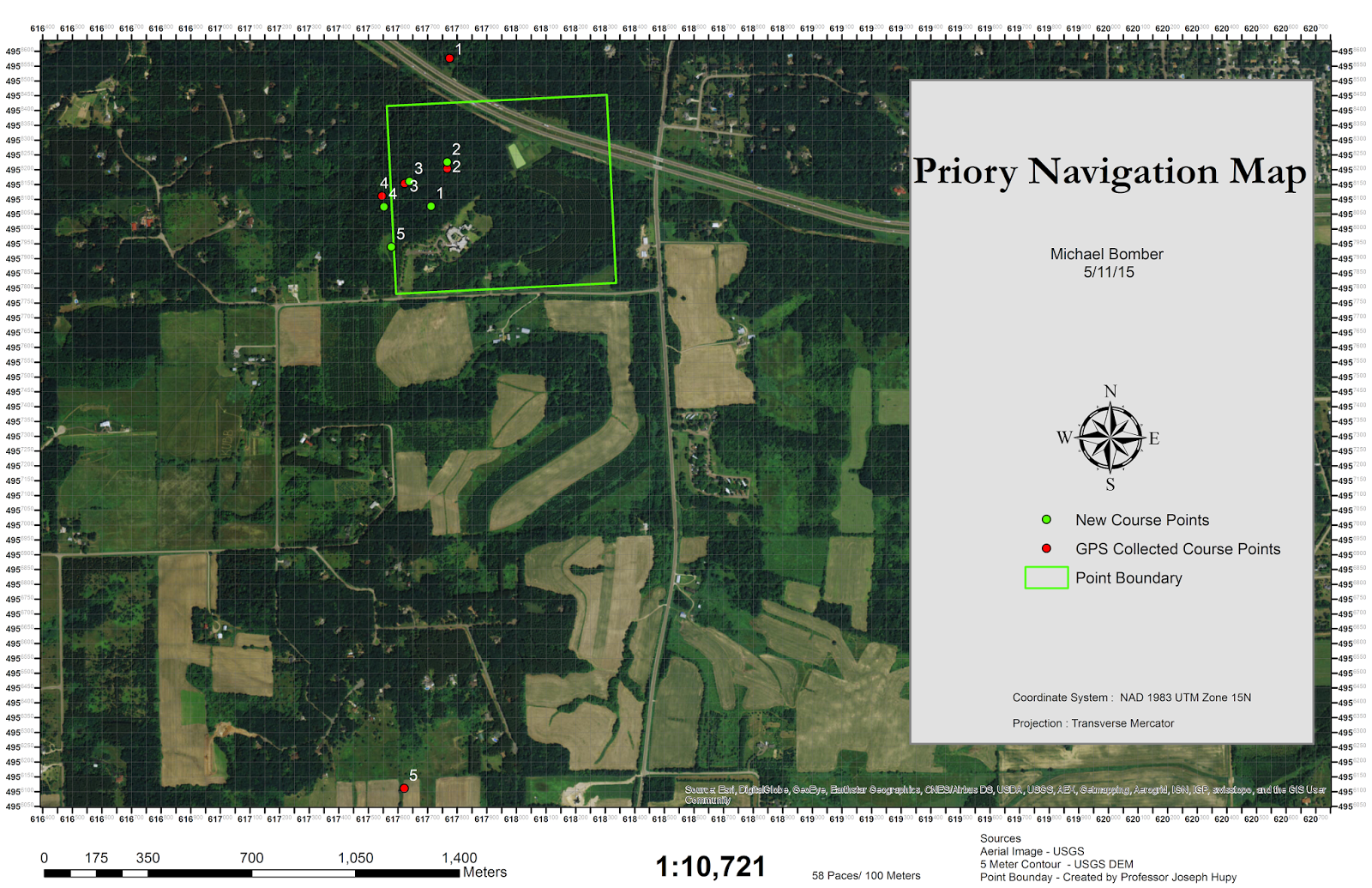
The first step to collecting data with a UAV is have a study area or a location that you are going to fly. When selecting an area to fly there are some things that need to be considered. The first is am I going to be close to people or putting others in danger by flying this area. We usually fly in areas of low population away from houses and people. Large open parks are ideal for flying. Another thing to consider is where can I take off and land from. It is good to have a flat open area with little to no vegetation on it. This reduces the risk of the UAV crashing into something like a tree or bush during take off and landing. Avoiding areas with power lines and cell towers is also important. The current flowing through the power lines and the signal coming off the tower can create electromagnetic pulses which can cause the compass and/or the GPS on the UAV to malfunction which could lead to a crash. In figure 3 you can see our study area in the yellow rectangle for our demonstration flight at the Priory. If you look at the map you can see the areas where my navigation points are from a previous week is very heavy tree cover and steep elevation. That is not a good area to land and take off in. The yellow rectangle is over an area that is flat with very few trees, no power lines and from this area you could see the UAV in the air at all times which is another study area consideration that needs to be thought about. Figure is a view from the take off location for our demonstration and also a ground shot of the yellow rectangle in Figure 3. You can see how open the area what that we were flying in, which is ideal.
 |
| Figure 3 is a map of the Priory property from a previous exercise but I choose it for this one as well to contrast some things. You can see the contrast in vegetation cover in the areas where the red navigation points are compared to the yellow rectangle where we flew the demonstration flight. The less large vegetation the better, at least for this flight. |
 |
| Figure 4 is a photo taken from the ground of the yellow rectangle area in Figure 3. |
Step 2 Mission Planning
Once you have your study area chosen and travel to that location the next thing to do is create your flight path and data collection mission. In order to do this we use a program call
Mission Planner made by 3D Robotics. This software communicates with the auto pilot on board the UAV and tells it where to fly. There are many other parameters that can be set in this program as well such as altitude, flight speed, how often to collect a picture, and what to do at each way point ascend, descend, land etc. To draw a flight path you draw a rectangle with a mouse on the screen and then based on the parameter you have set Mission Planner fills in the flight grid. You can also manually enter the way points like I have done in figure 5. Once it creates the grid it will tell you an estimated flight time which is good to know because these vehicles do have a limit on flight time. Once you have your mission drawn you can get ready to fly with the next step.
 |
| Figure 5 is a screenshot of Mission Planner. I have manually drawn out a flight path for a mission over the soccer park here in Eau Claire. You can see at the bottom of the image where you can set all the parameters for each point in the flight. If I were connected to an aircraft it would also tell me an estimated air time for this flight. It is important that these flight lines are close enough together to ensure the correct amount of image overlap. We shoot for 30% overlap and this program will adjust the flight path to accommodate that depending on which sensor you are using. |
Step 3 Pre-Flight Checklist and Notes
This next step is the most important. Professor Hupy and I after some crashes and other growing pains in our research with UAV's came up with a pretty extensive checklist to go through prior to putting any of the UAV's in the air. Once the mission is created and the UAV is assembled going through the checklist is essential. We use the checklist shown in figure 6. We check the weather, all connections both frame and electrical, prop and motor check, battery and antenna check, controller and command center, battery voltage, number of satellites, mission sent to UAV, check takeoff area for people and then clear for launch. I haven't read the whole list but this gives you an idea of how many things we check. We
check everything we can think of
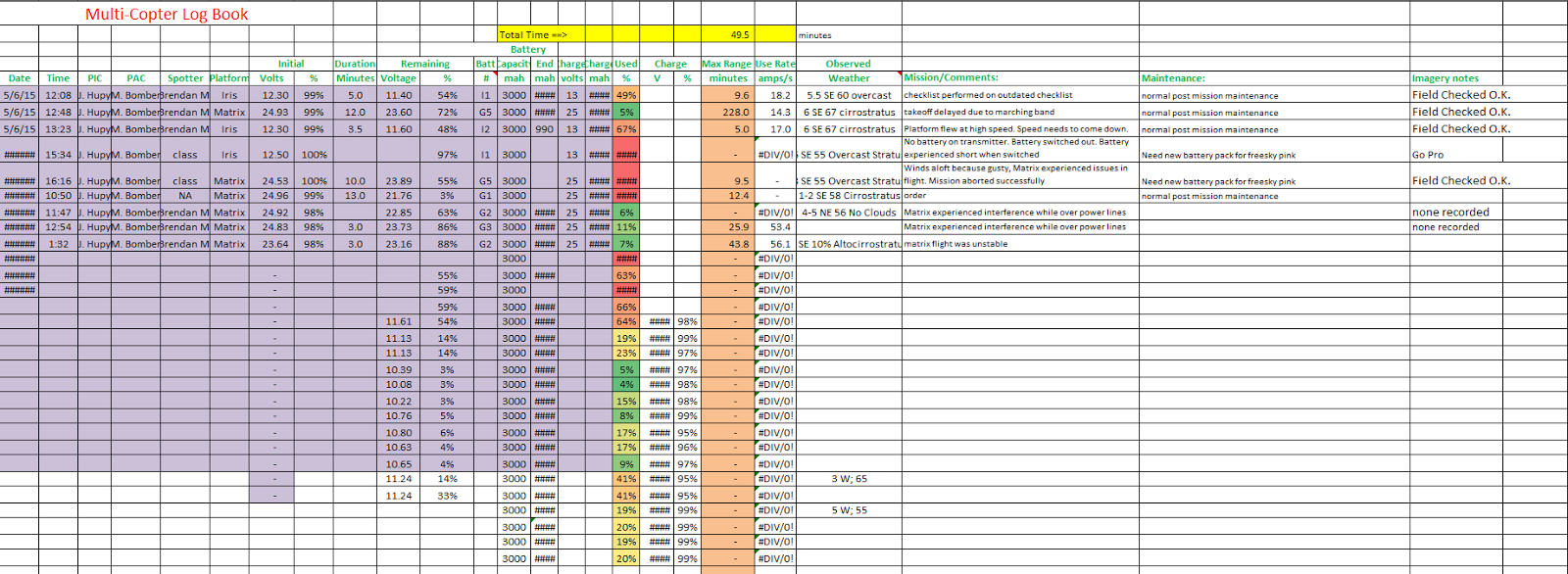
every time we fly. This is the golden rule of using UAV's. It is over looked many times and that leads to accidents which cost money and can damage property or even kill someone. Notice how the majority of this checklist happens before the aircraft is powered up, there is a reason for that. Once the UAV is powered up reducing the time someone is around it adjusting things the better. An accidental arming of aircraft could result in loss of fingers or worse depending on the platform. After every flight we take notes about the flight in a log book we have created as well. This is more to do with battery charging, post flight maintenance of the vehicles if needed and data processing. Figure 7 is a screen shot of the other excel sheet we use to keep track of all of our flight data.
 |
| Figure 6 is the pre-flight checklist we go through before every flight. We do not fly until there is a check by each row. Like I stated earlier this helps us to fly safely which is many times overlooked because people think UAV;s are just toys and that they aren't dangerous. We know the dangers and use our checklists! |
 |
| Figure 7 is the spreadsheet where we keep all the information about each flight. We record battery voltages, weather info, maintenance needs and suggestions for what to do better on the next flight. |
Step 4 Mission Execution
Once the the pre-flight checklist is complete the next step is to fly the mission. Part of the checklist is sending the mission to the UAV's auto pilot. Once this is done the aircraft is armed. After we are sure the area is safe we prefer to take off manually to about 10 meters height and do a stability and normal function test. We place it into loiter to see if it is functioning properly and can hold its position, if everything looks good it is flipped to auto pilot and it begins to fly the previously created flight path. During the flight there are a couple different jobs the crew flying the UAV need to perform. One is the pilot at the controls who has the controller in there hands and is piloting the aircraft. Another is the spotter who keeps an eye on the UAV at all times while it is in the air to make sure it is flying normally. The third person is the pilot in command. This person sits at the command station and watches the diagnostics on the Mission Planner screen (Figure 9). The person watching the laptop watches diagnostics like battery voltage, number of satellites, altitude, air speed, pitch, yaw, roll and that the aircraft is following the planned flight path. If anything looks suspicious this is the person who can abort a mission. When we flew the Matrix at the Priory for this activity we aborted a mission and safety landed the aircraft. I was at the laptop and saw that the UAV was deviating from the flight path and the spotter observed it acting rather strange in the air. I made the decision to say abort mission and the pilot at the controls, professor Hupy, said aborting mission and put the aircraft in RTL mode. RTL mode stands for return to launch. If at any time during the mission this switch is flipped the UAV stops whats it is doing and returns to where it took off from and lands itself. The mission may not have needed to be aborted however the class was relatively close to where the UAV was flying and as a safety precaution I decided to abort.
 |
| Figure 9 is the display that the Pilot in Command watches as the UAV is in the air. You can see altitude, speed, battery voltage and other vital information is displayed here. If there is a catastrophic failure on board the UAV it will tell you on this display. If the GPS failed for example where it says DISARMED on the screen it would say NO GPS or GPS FAILURE in big red letters at which the mission would be aborted. |
Discussion
Stressing safety and common sense while flying a UAV is very important. UAV's are very useful and economic solution to perform a wide variety of tasks, however they get a bad reputation from people who use them improperly.I think this activity showed the class how important safety is and how much we are trying to stress it and emphasize it when we fly for research here at UWEC. I hope the class found this activity interesting, It can be a lot of fun flying UAV's and it is a good hobby to have I think but it is going beyond just the hobby and attaching cameras and sensors to the UAV to make it a system which can collect valuable data. When we flew this activity at the Priory we were using a special sensor made for us in the Twin Cities by a small private company. It contains two cameras, one RGB and one near infrared. With this camera we can take normal aerial imagery and look at vegetaion health at the same time. To give you an idea what the imagery looks like that we collected at the Priory I've included a few samples in figures 10 and 11. Figure 12 is a short video of the IRIS UAV.
 |
| Figure 10 is an image of the data we collected during the aborted mission with the Matrix. The sensor we are using saves the images to a USB drive which is plugged into the command laptop where the images are quick mosaic together so that we can see if we have images of everything we wanted before heading back to the lab. |
 |
| Figure 11 is a RGB image taken by the Matrix during its short flight at the Priory last week. You can see the parking lot and the students looking up at the UAV. Hundreds of images like this one get combined or mosaic to make up one big image of a study area. |
Conclusion
I really enjoyed this activity. Helping with the demonstration was fun too. I look forward to doing similar activities next semester with professor Hupy in his UAV class. It is rare to have a class like that offered at the undergraduate level especially when you can combine it with an already impressive GIS program. These classes will allow a student to learn how to go out and collect data with the UAV and then be able to their own data analysis with the GIS skills they are learning. This combination of skills will be very desirable to employers when the students graduate and they can continue to use their skills in this field for one of the hundreds of uses for UAV's and spatial data analysis.



































{kind=link}