Introduction
This weeks field activity involved the creation of two navigation maps in preparation for a navigation activity out at the UWEC Priory in a couple of week when the snow is hopefully gone. We also learned how to measure our pace count which will also be used in the navigation exercise.A pace count is how many steps one takes in order to cover a set distance. In our case that distance was 100 meters. A pace is every time the foot the person steps with first hits the ground. So if they start with the right foot, every time that foot hits the ground that is one pace. In order to find the pace count we went outside and measured off a 100 meter distance with laser measurement devices, but you could also do this with a tape measure or other low tech equipment. We then walked the 100 meters and counted our paces. Each person did it twice to get a more accurate pace number. Pace numbers varied from 58 to 75 or so which is caused by the height and stride length differences of each person. I got a pace count of 58. When on smooth terrain using the straight up pace count is adequate but when in rough hilly terrain 2 to 3 paces should be added for every pace because in most cases rough terrain causes stride lengths to get shorter. Knowing your pace count while navigating helps you to estimate your position on a map based on paces from certain objects or land forms.
Methods
We were asked to create two separate navigation maps for this exercise. Both over the same navigation area, set by Joseph Hupy,of the Priory. One map had to have a grid system using Universal Transverse Mercator (UTM), the other map was to use decimal degrees of latitude and longitude.The first map created was in a UTM coordinate system. UTM uses a two dimensional coordinate system to assign location points to the earths surface. This system uses 60 different zones, each of which is 6 degrees wide in longitude. In each zone a secant transverse mercator projection is used.
 |
| The image shows the layout of the UTM zones on the surface of the earth. They are divided into northern and southern zones and each contain 6 degrees of longitude. Eau Claire Wisconsin is contained by UTM Zone 15N. (Figure 1) |
The second map was to use the World Geodetic System (WGS) which is based on decimal degrees of latitude and longitude. This system is widely used for GPS and cartography purposes.
 |
| The WGS uses longitude and latitude lines on the earths surface to assign location points. (Figure 2) |
 |
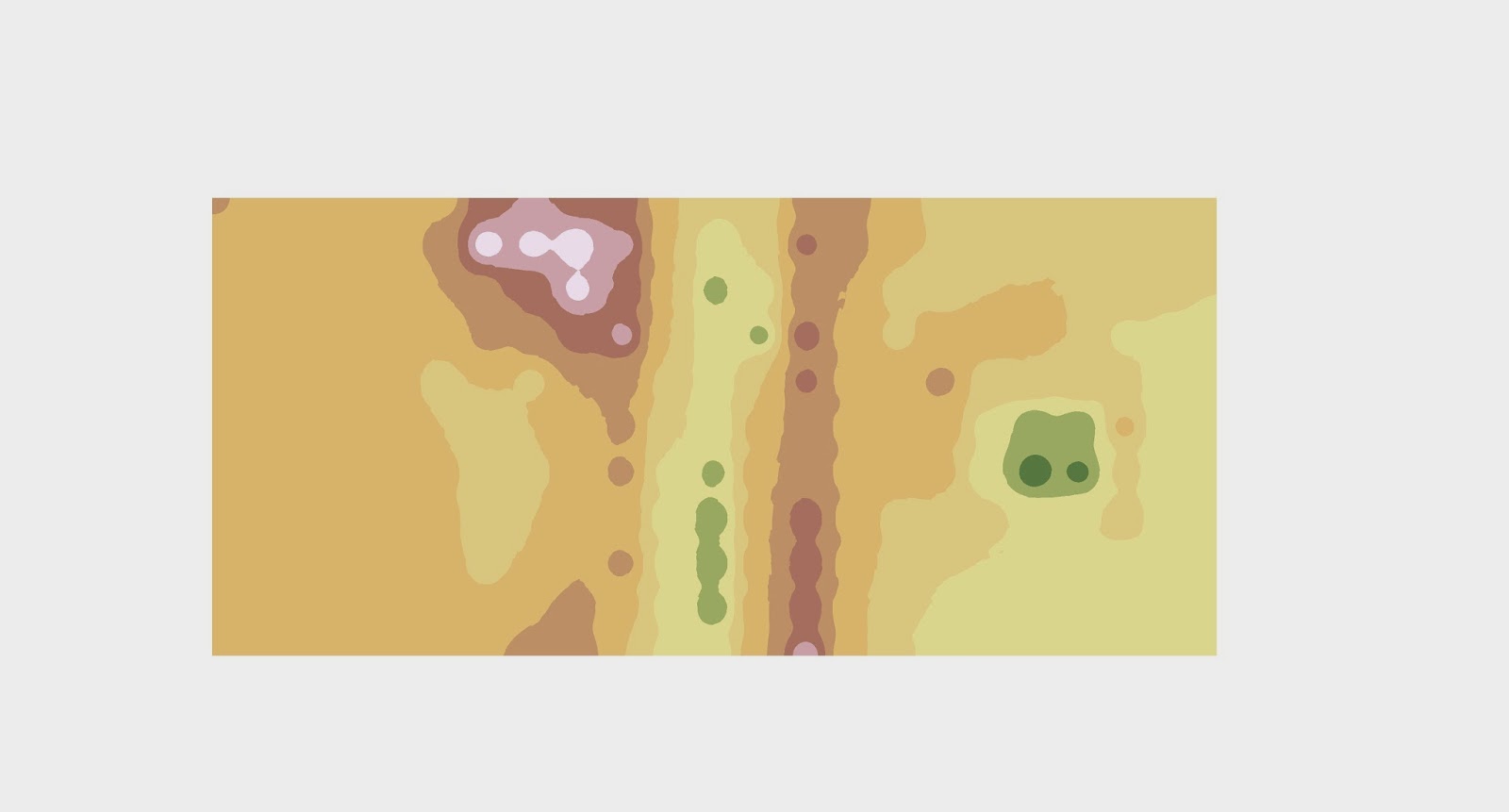
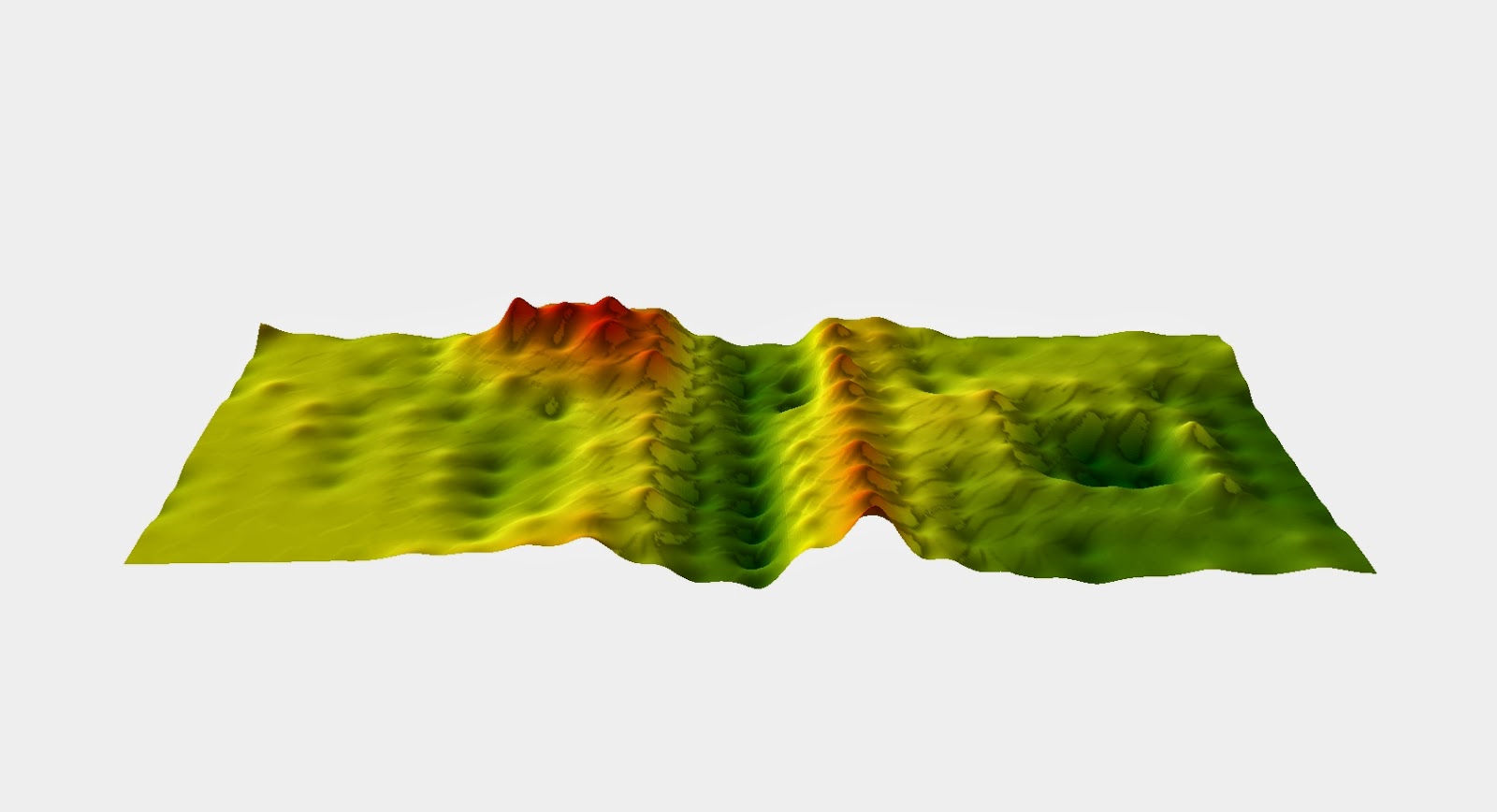
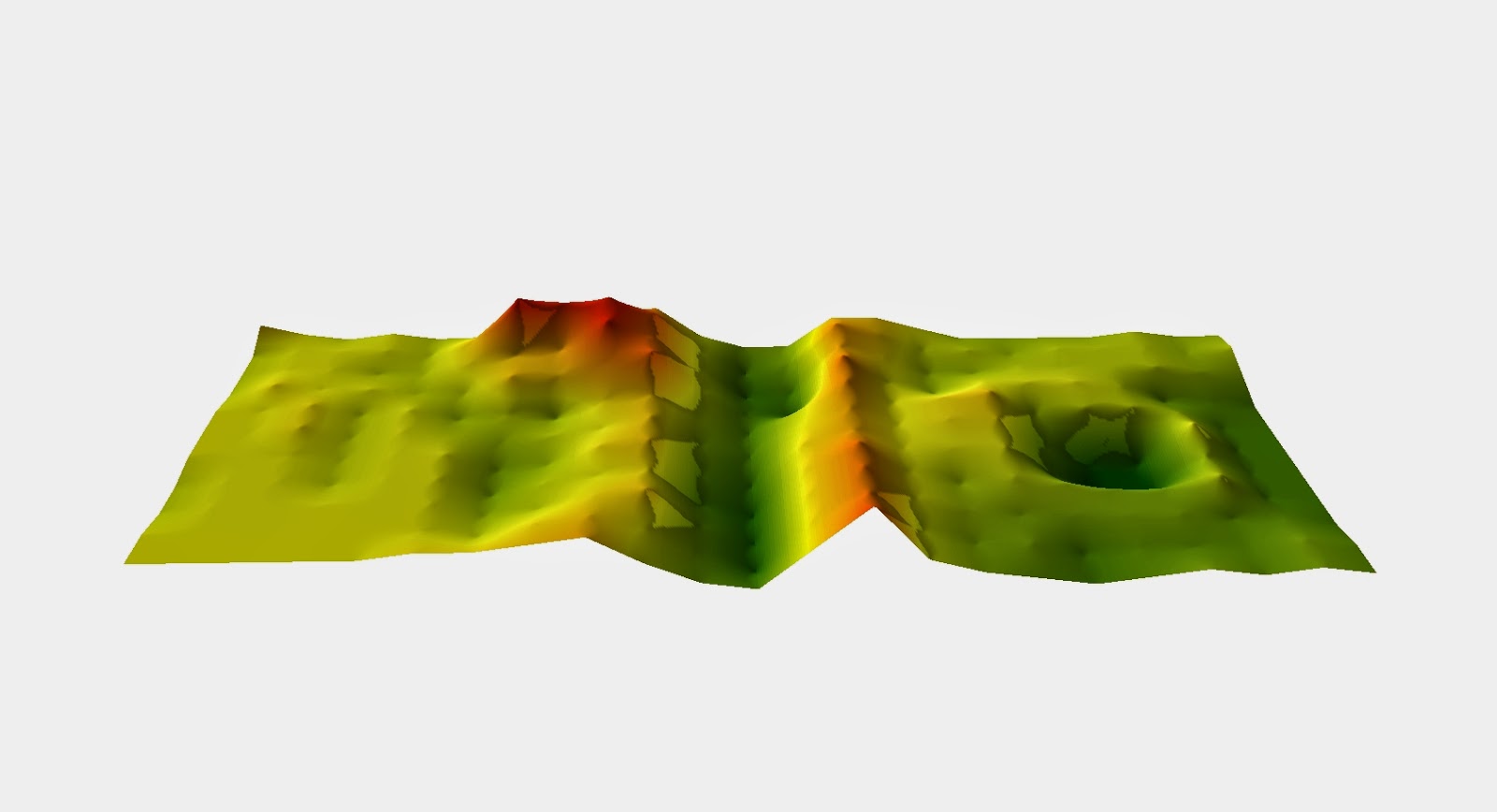
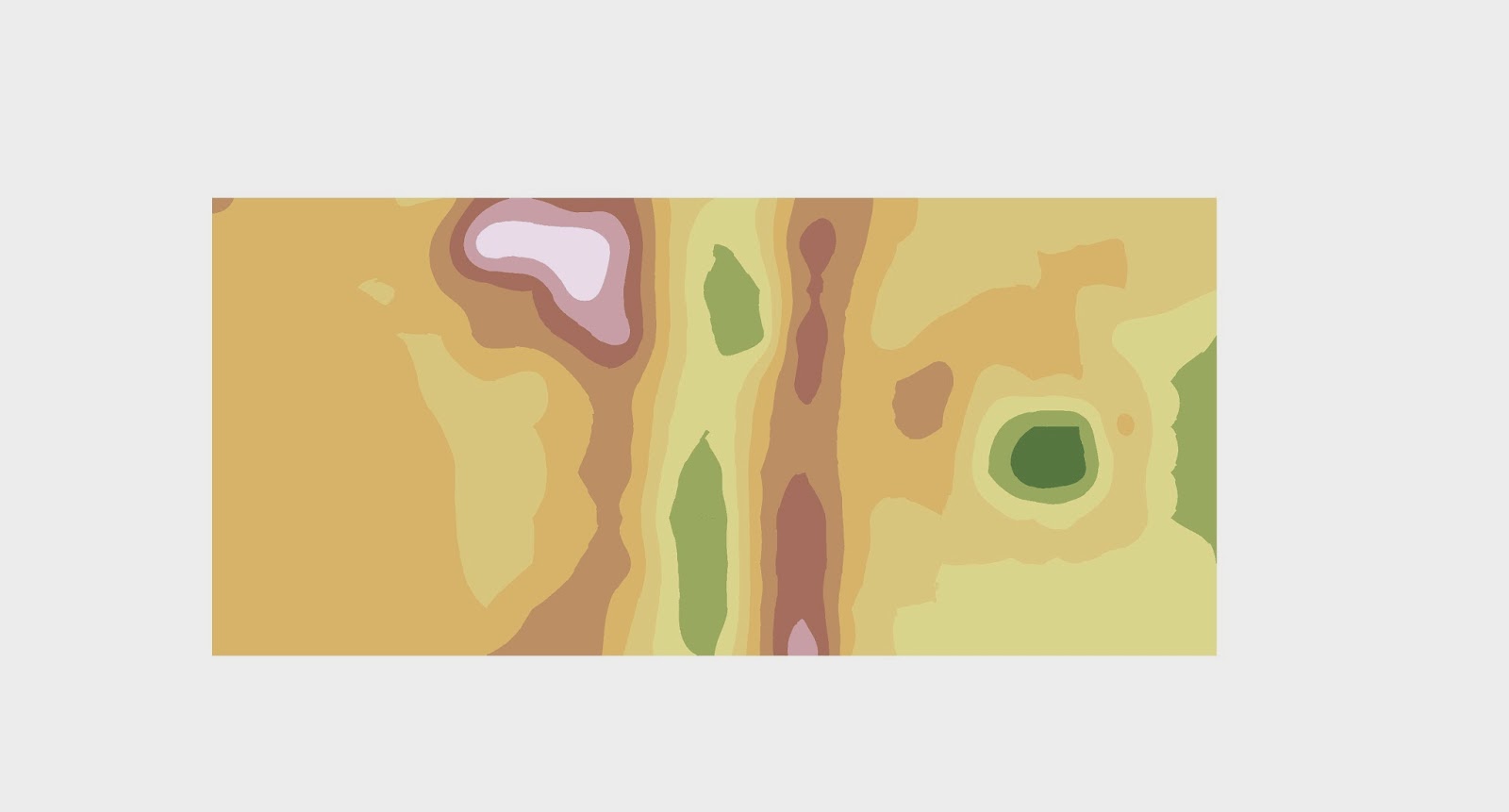
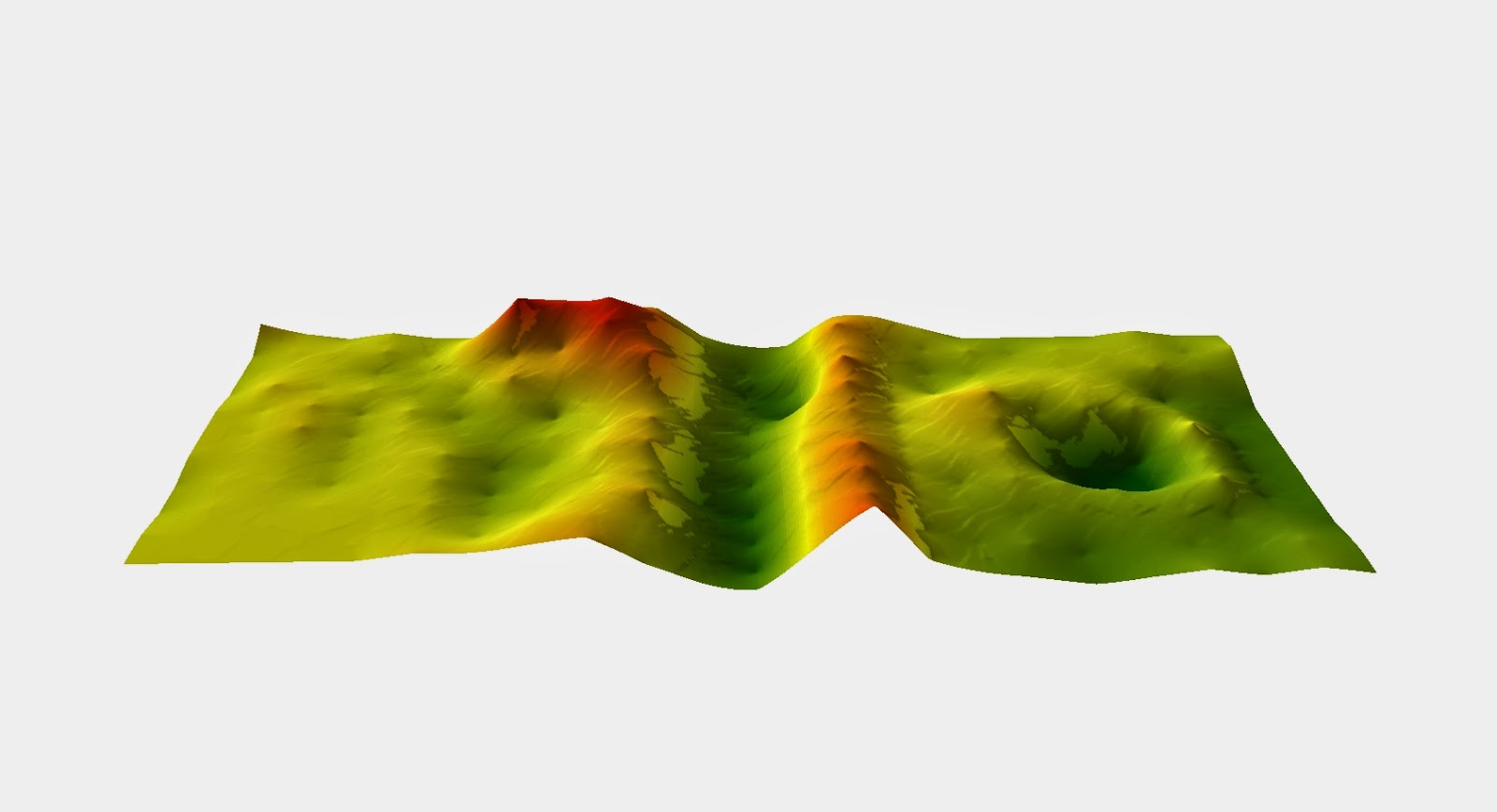
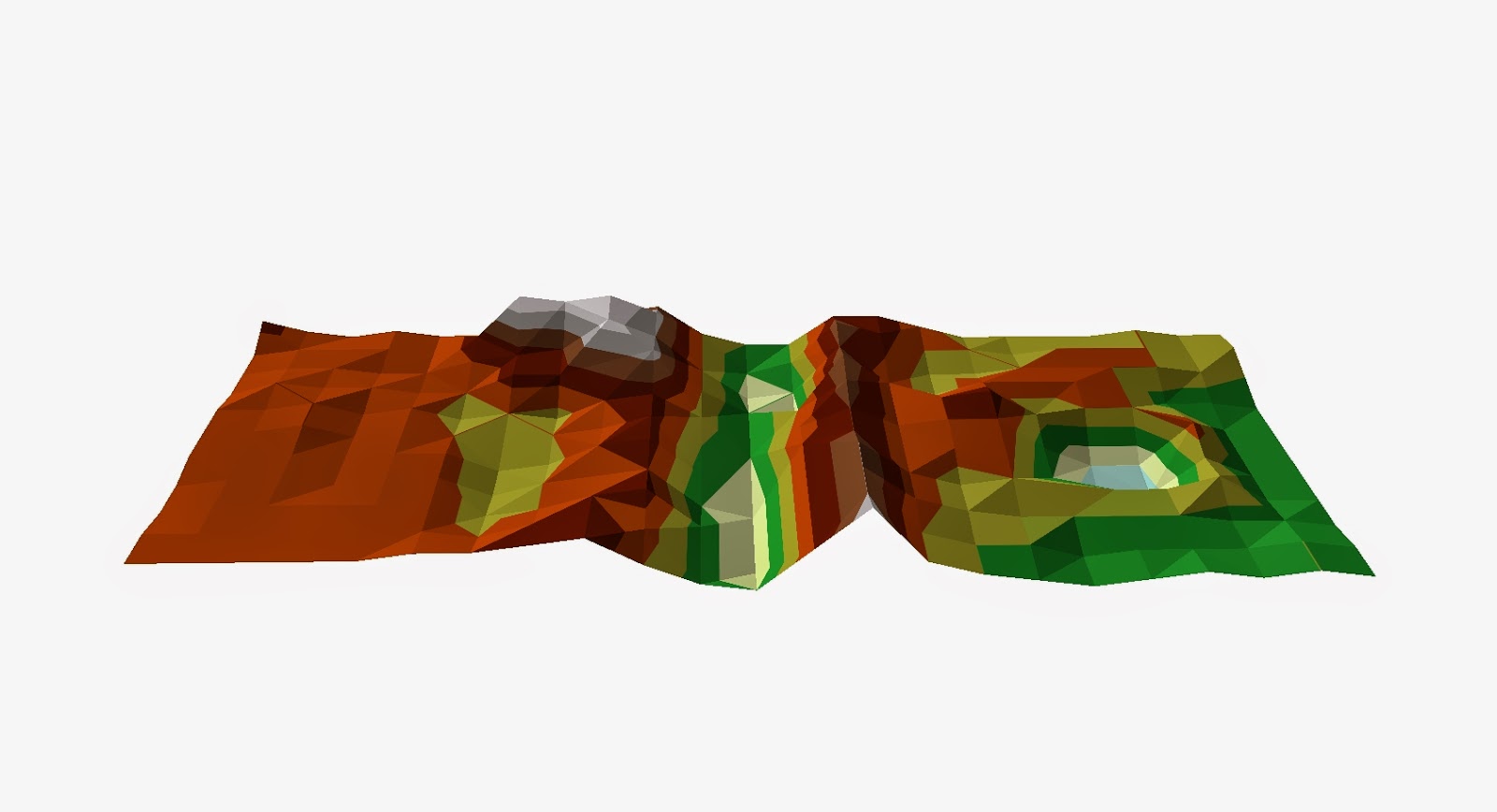
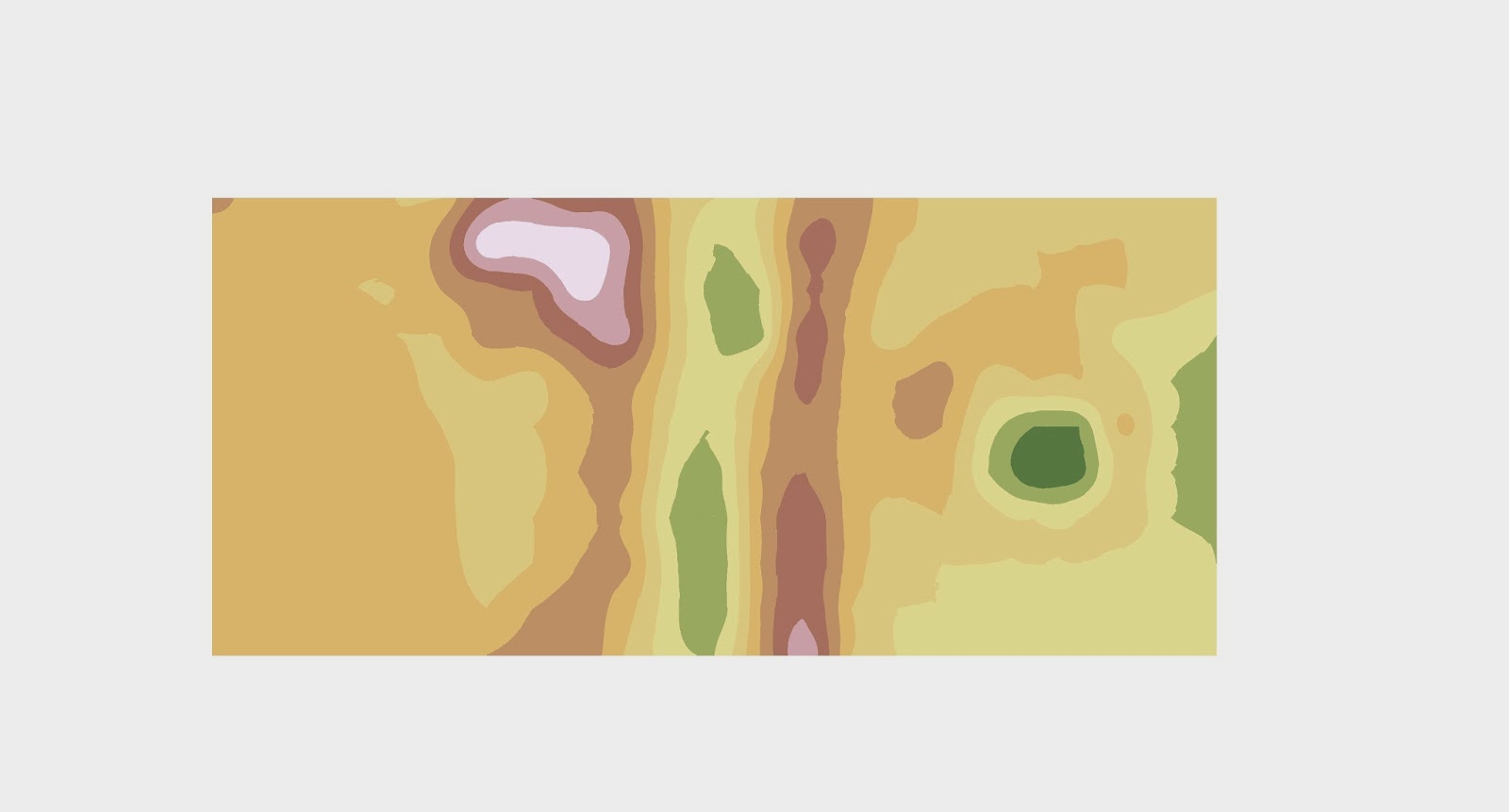
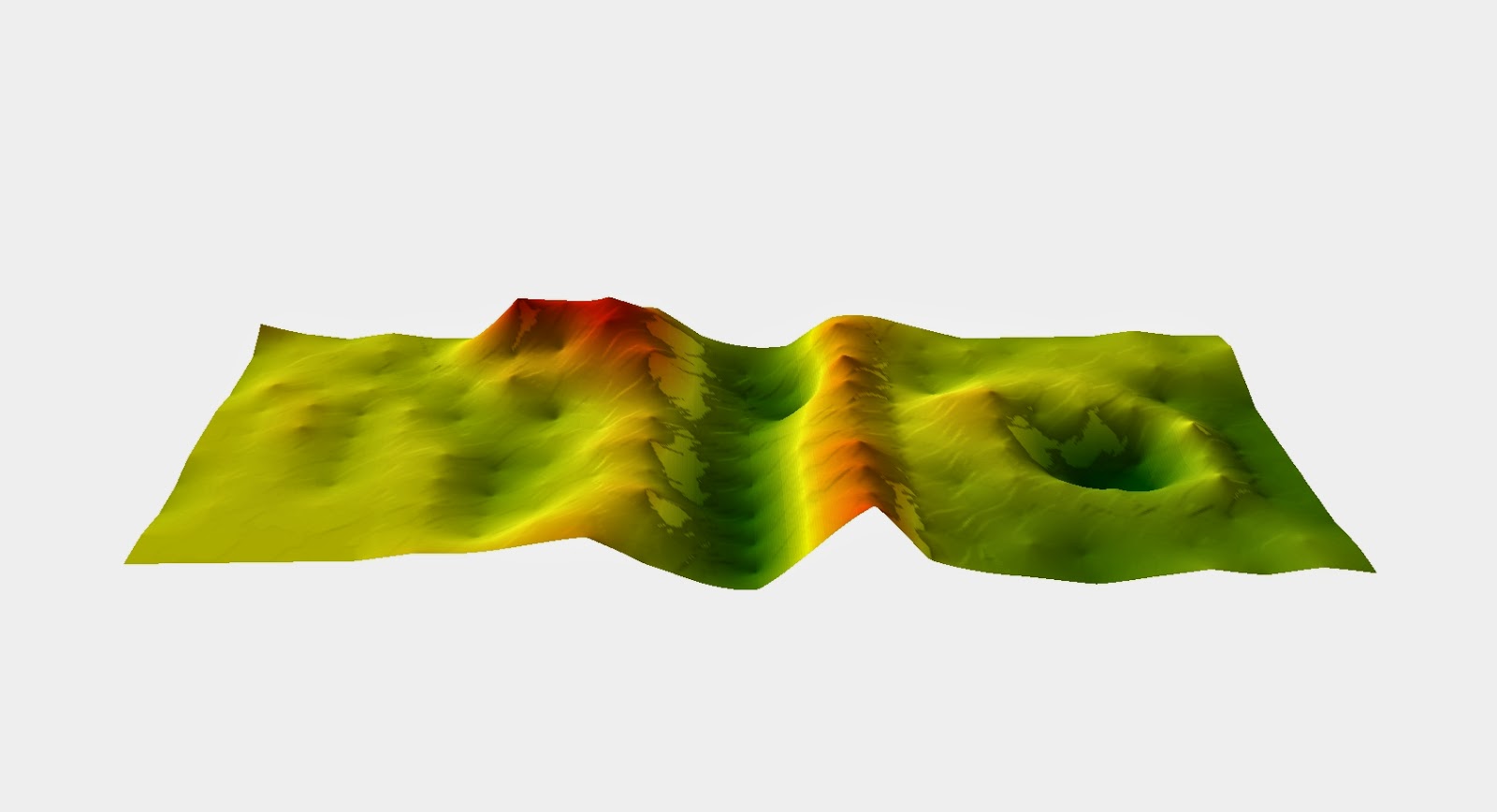
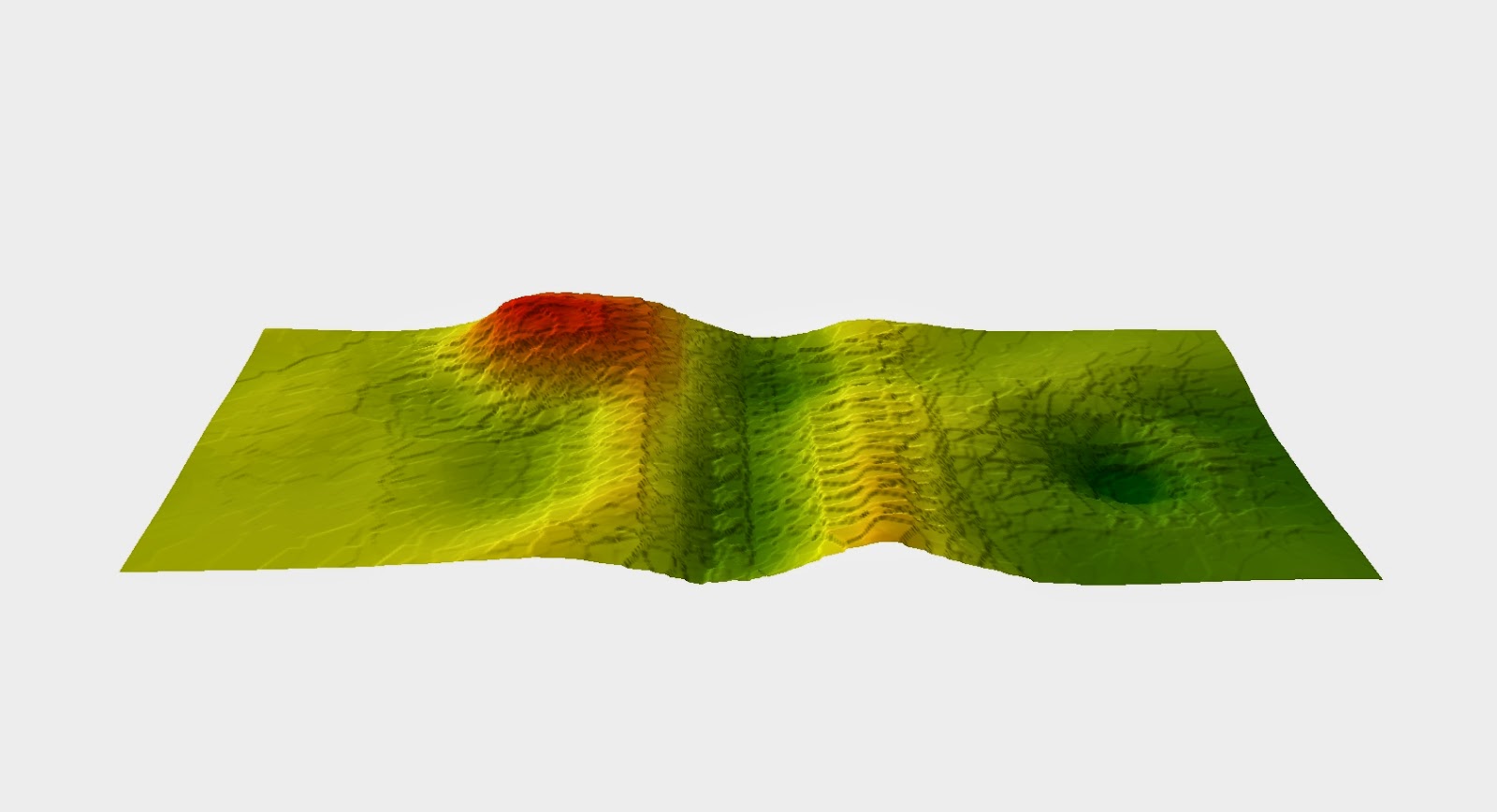
| This is the DEM of the navigation area of the Priory. Areas in red are higher elevation and as they get lower they turn more green. This image allows us to visualize the elevation changes on the Priory property which we can take into consideration when navigating and taking a pace count.(Figure 3) |
 |
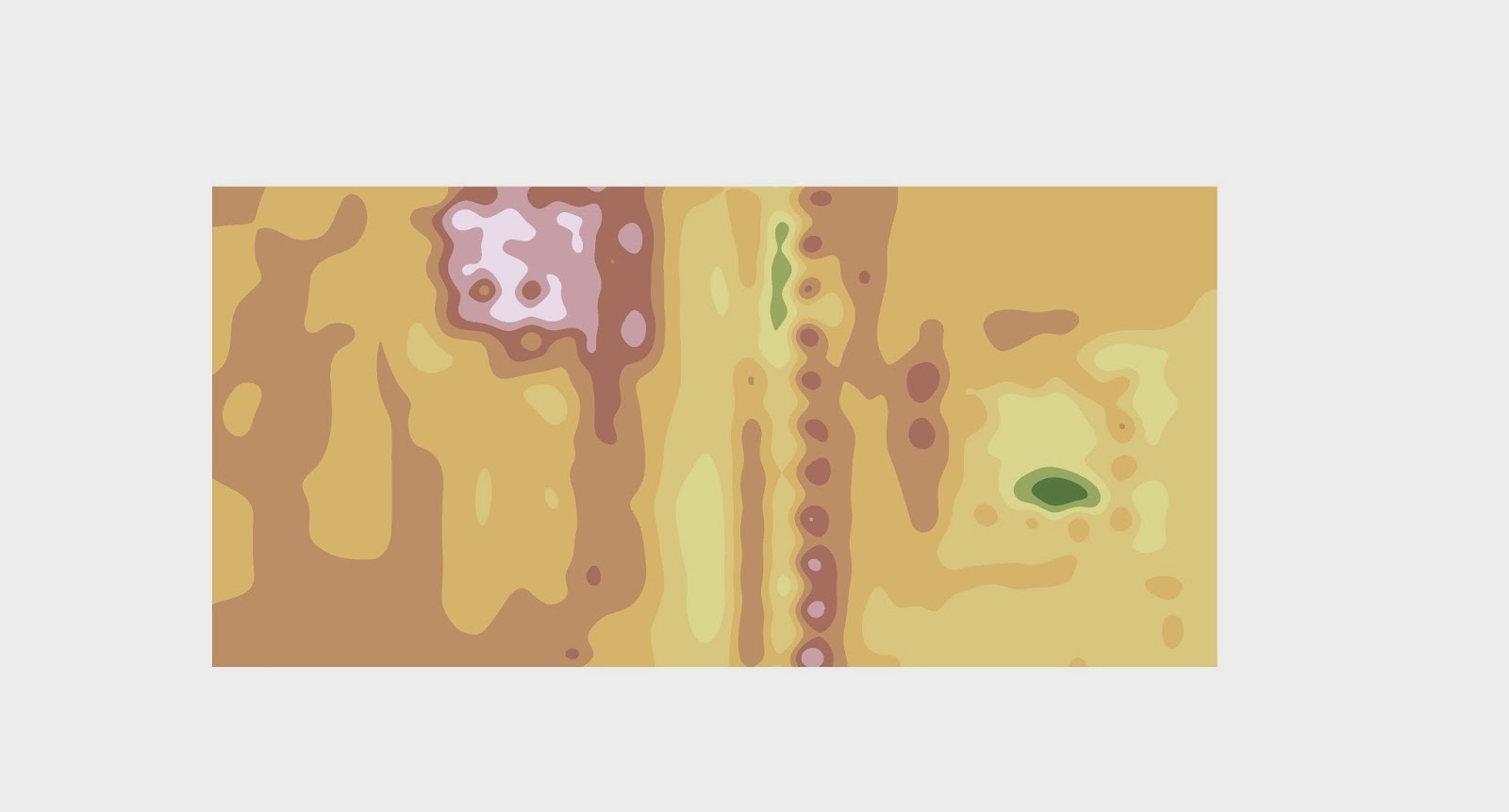
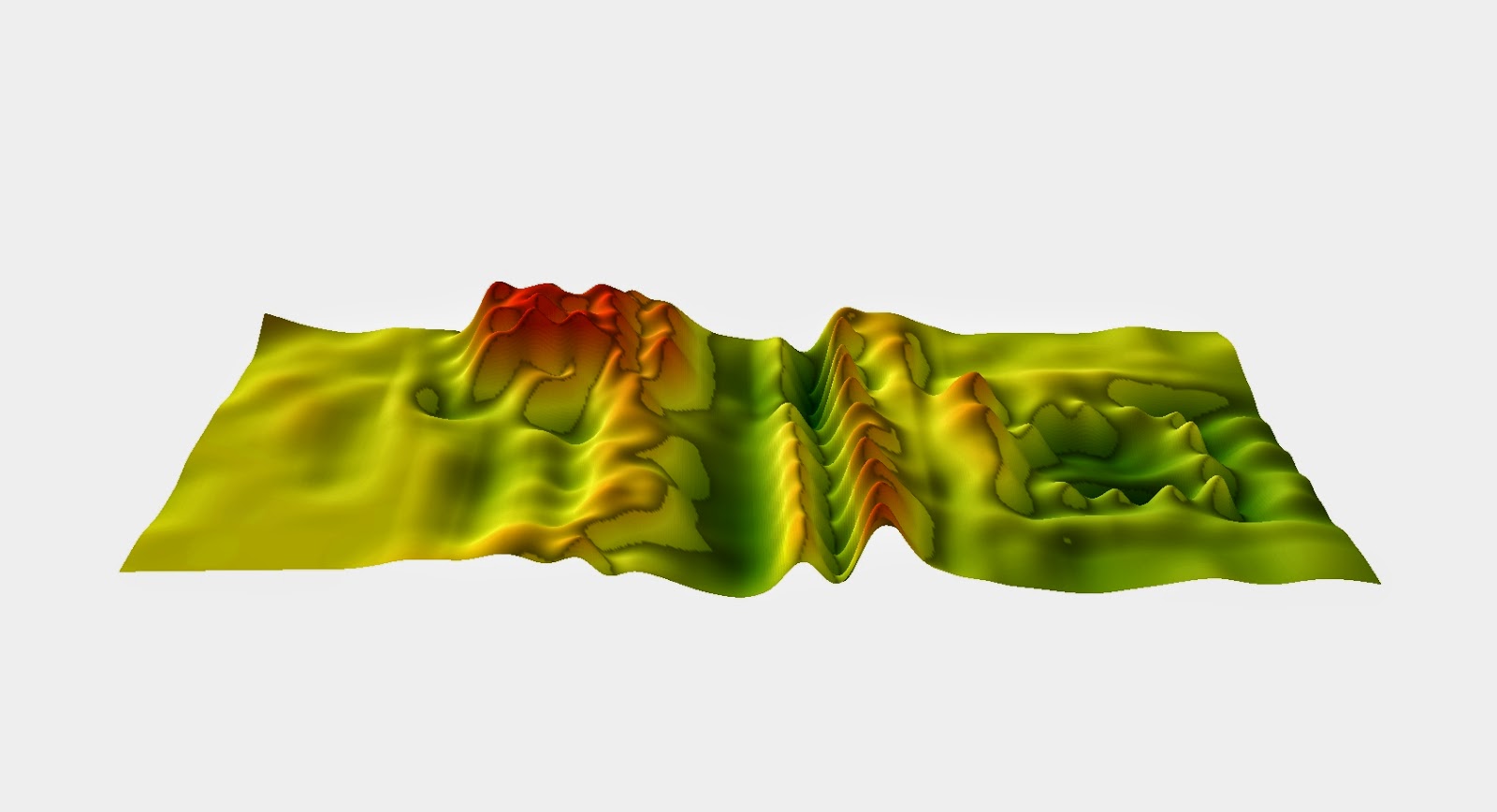
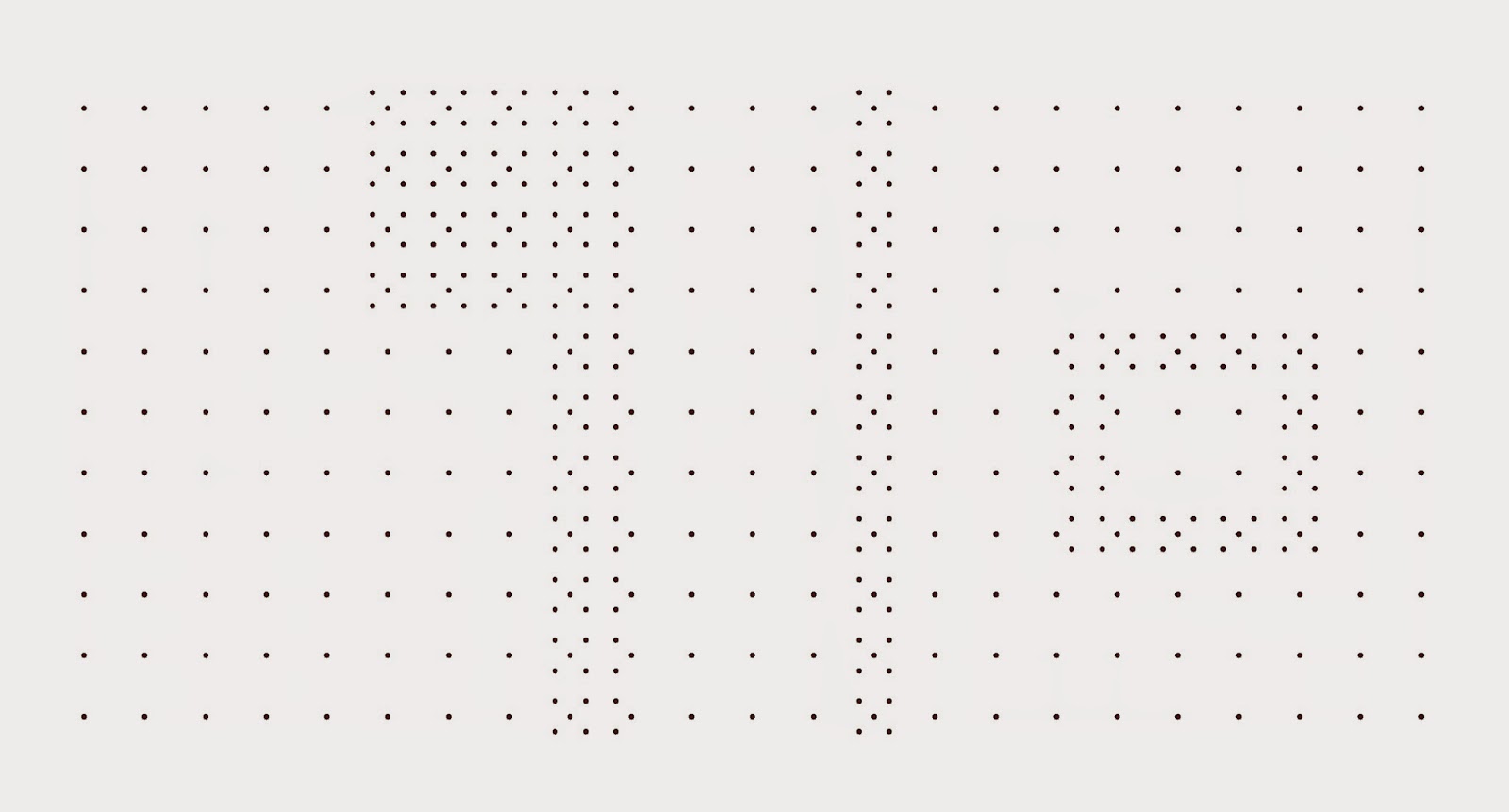
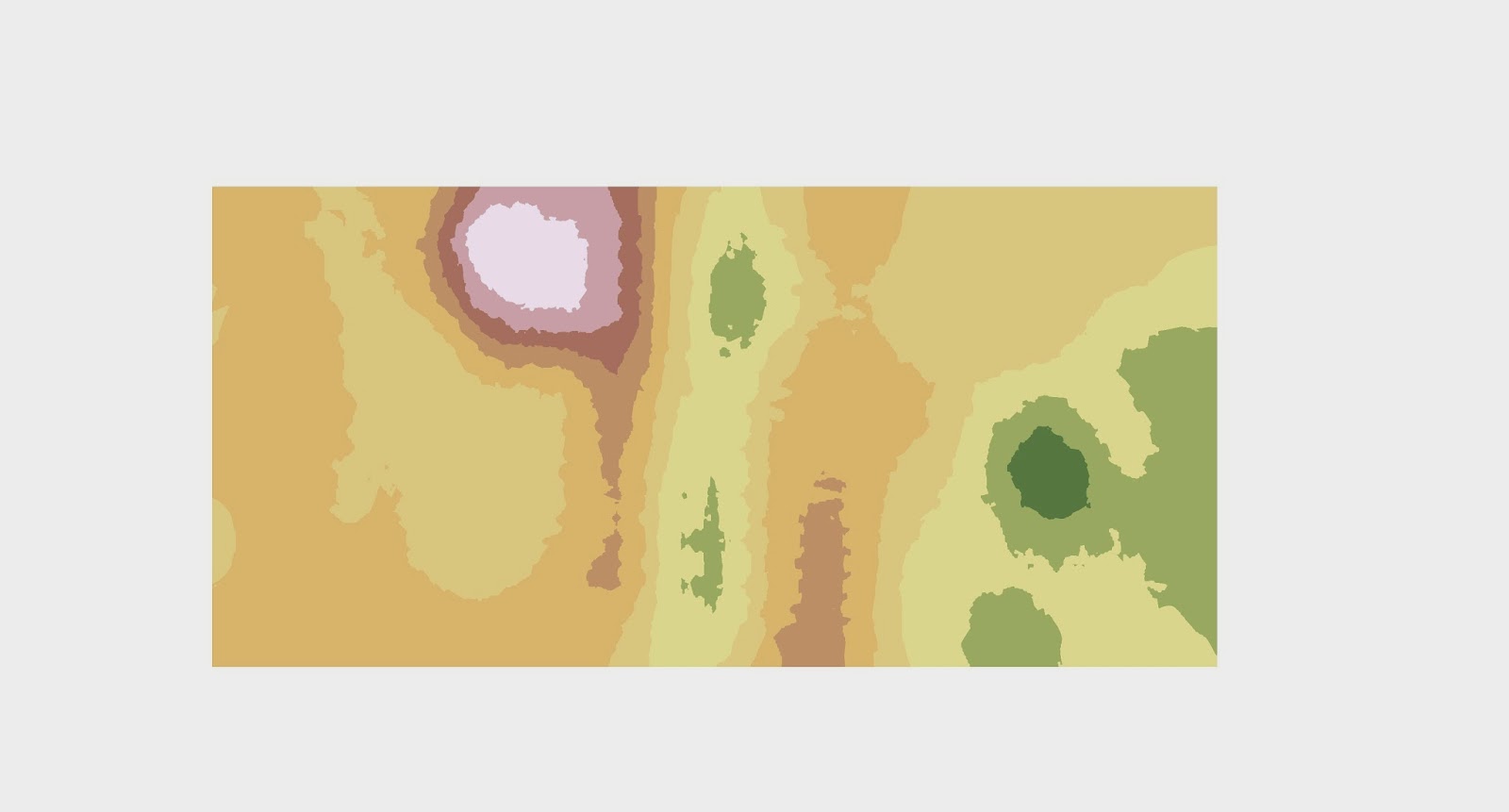
| This is the contour line feature that was created through use of the Surface Contour tool in ArcMap using the above DEM. These are 5 meter intervals. I chose the 5 meter interval to still get a good idea of the elevation change but keep the map clean and useable. I also added labels to the contours for reference. (Figure 4) |
 |
| This is an aerial image of the Priory on the outside of Eau Claire where we will be navigating in the future with the maps created today. This Aerial image is available through the US Geologic Survey. The red rectangle is the point boundary within which the navigation points will be. (Figure 5) |
Once my maps were projected the final step was to insert a grid on each one. This is a fairly easy process which I repeated for each map.
Step 1. With the map in layout view right click on the data frame Layers and select Properties from the drop down.

Step 2. In the properties box click on the Grids tab. You then want to select New Grid. This will open a new window where you can select what type of grid you want. (Graticule, Measured, or Reference.)

Step 3. For my first map I selected Measured. The second map I chose Graticule.

Step 4. When you click measured you see the window below in which I entered 50 for the x and y axes and made sure the UTM zone 15N coordinate system was selected. Hit Next.

When you click graticule the window below pops up in which the seconds column should be changed from 30 to 2. Hit Next.

Step 5. For both maps click Next on the Axes and Labels window.

Step 6. Click Finish on the Create Grid window below.

Results
After completing the steps above to create the grids and also doing some cartographic designing the maps below are my final products. The first with measured 50 by 50 meter grid system using UTM Zone 15 N. The other with a craticule grid of 2 seconds using GCS NAD 1983 (2011). |
| UTM based grid navigation map. (Figure 6) |
 |
| Degrees longitude and latitude navigation map. (Figure 7) |
Discussion
These two maps are similar but are completely different in the way they use different coordinate systems. This difference will have an impact on how navigation is done using each map. Both maps are equipped with the necessities of navigation maps. Both have aerial imagery which can be used to find land reference points and land marks, a DEM to get a idea of the general lay of the land, contour lines to give more detail of elevation when needed, and a coordinate system which allows the user to create point locations and judge distance.I have a feeling that one of these maps will be easier to navigate with but that will be determined when we do that exercise. The UTM map is measured in increments of 50 meters which makes determining distances very easy and the image should not be very distorted because Eau Claire is fully in Zone 15N of the UTM grid. I think the GCS grid will be more difficult to use but again we will have to wait and see.
Conclusion
Most people are used to using GPS units and other electronics to navigate now a days, however knowing how to navigate from a map is a very important skill to posses. Through the use of pace counts, the grid systems on the maps and a compass a person with proper knowledge should be able to navigate without any electronic devices. Now that we have created our navigation maps, know and understand a lot of the concepts that go into creating a good navigation map the navigation exercise at the Priory in a couple of weeks should go fairly smoothly, however there is always the chance of someone getting lost. We will be able compare what parts of the maps worked well or didn't work so well for future reference and a better understanding, if we ever make another navigation map.Sources
Aerial Image - USGS5 Meter DEM- USGS
5 Meter Contour - USGS DEM
Point Bounday - Created by Professor Joseph Hupy